El MIT crea un sistema que permite a los robots aprender observándose a sí mismos

Investigadores del MIT desarrollaron una tecnología que permite a los robots blandos aprender de su propio movimiento sin necesidad de sensores, GPS ni programación manual. El sistema, diseñado por el Laboratorio de Ciencias de la Computación e Inteligencia Artificial (CSAIL), utiliza cámaras comunes y técnicas de inteligencia artificial para que los dispositivos construyan un modelo interno de su cuerpo.
¡Mantenete al tanto de las últimas noticias de San Nicolás y el país!
Unite a nuestro CANAL DE WHATSAPP y recibí las novedades directamente en tu teléfono.
📲 Click AQUÍ La investigación, publicada en junio de 2025 en la revista Nature, representa un cambio de paradigma en la robótica blanda, un campo que busca crear máquinas más flexibles, adaptables y seguras para operar en entornos cotidianos.
Aprendizaje autónomo sin sensores
El sistema permite que los robots se observen a sí mismos durante movimientos aleatorios, generando un modelo visomotor capaz de predecir cómo se deformará su cuerpo ante distintos comandos. Este proceso utiliza una técnica llamada Campos Jacobianos Neuronales, que traduce señales visuales en un mapa continuo de control en tiempo real.
“Los Campos Jacobianos Neuronales permiten que los robots blandos de CSAIL controlen su movimiento basándose únicamente en lo que ven”, explicó Daniela Rus, directora de CSAIL, en declaraciones a Forbes.
Modelos internos creados desde la imagen
El sistema se entrena con imágenes en 2D, que luego una red neuronal traduce en un modelo 3D del cuerpo del robot. Según Vincent Sitzmann, investigador principal del proyecto, esto es posible gracias al uso de renderizado diferenciable y algoritmos de seguimiento de movimiento como el flujo óptico.
“En lugar de sensores en cada motor o modelos tridimensionales precisos, rastrean el movimiento del robot en video y aprenden de ahí cómo responde cada parte del cuerpo”, detalló.
Resultados con tres robots experimentales
Los investigadores probaron el sistema en tres dispositivos distintos:
- Un brazo robótico impreso en 3D, que aprendió a dibujar letras en el aire con precisión centimétrica.
- Una mano neumática suave, que dedujo qué conductos de aire activaban cada dedo solo a partir de videos.
- Una plataforma robótica deformable, que mantuvo el equilibrio y siguió trayectorias a pesar de cargas adicionales.
En todos los casos, los robots lograron comprender su geometría, sensibilidad y respuesta motora sin modelos previos ni sensores incorporados.
Aplicaciones futuras y reducción de costos
Este enfoque puede tener impacto en campos como la robótica doméstica, agrícola e industrial, donde no se requiere una precisión extrema pero sí se valora la adaptabilidad y el bajo costo de fabricación.
Según Sitzmann, el objetivo es que estos sistemas puedan extenderse en el futuro a tareas más complejas, como manipulación precisa, integrando visión y percepción táctil.
“Los robots blandos pueden funcionar como organismos vivos, adaptarse a entornos y aprender con pocos recursos. Este método lo vuelve posible sin depender de infraestructuras costosas”, concluyó.
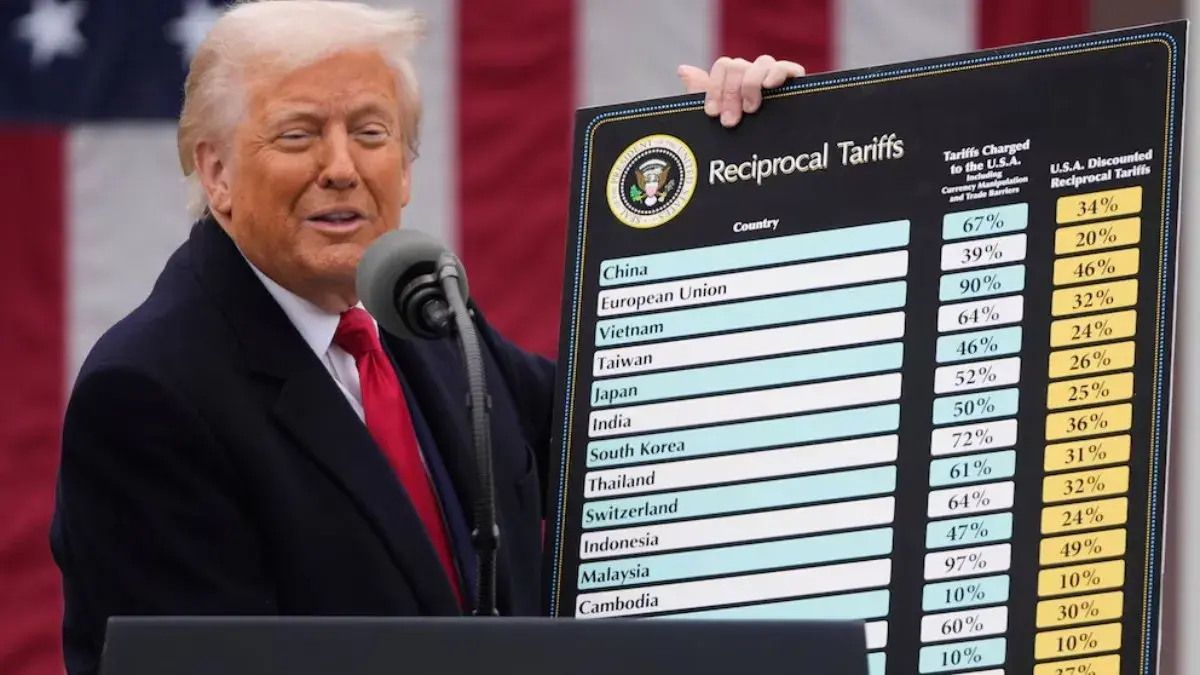
LEER: Estados Unidos aplicará nuevos aranceles de hasta 12,5% a importaciones de 60 países desde este viernes